图论基础1:概念与术语
引言
生活中我们会遇到很多问题:比如张三和李四认识但是和王五不一定认识;滨和路到龙翔桥可以直接通地铁,但滨和路到萧山国际机场却要换乘。这些问题似乎都有些共性:如果我们把人,地铁站这些对象看成点;把人际关系,地铁线路看成边,从而将这些点连起来,我们可以通过这一幅图中观察出一些性质。其中,这个图形就叫做图(Graph),研究这个性质的理论就叫做图论(Graph Theory)。
图的定义
严格的讲,图
一般的,点集里面我们会使用数字来代表这个节点,这个数字就叫做节点编号,点集合
图的术语
图当中有很多术语,我一一解释:
以下的示例都指的是无边权的图。
有向图和有向边:
我举个例子,蛤四有个巨佬叫做 ljt,我初中的时候听说过他,但是他初中的时候不知道我,此时我和他之间是单向的关系,那么如果我们都是一个节点,我们两个之间的边就是单向边,如果一幅图中所有的边都是单向边,那么这幅图就叫做有向图(directed graph)。
显然的,有向图中的边对应的二元组
无向图和无向边
无向图很好理解,比如我和一个人是朋友,那么我是她的朋友,她也是我的朋友,我们这是互相的关系,此处的边对应的二元组
在竞赛当中,我们经常会把无向图当成双向有向图看待,就是对于无向图当中的每一个边都建成两条端点相同,方向相反的边从而处理。(它们的结果是相同的,比如
有限图和无限图
学过集合的应该知道,集合可以是有限的集合,叫有限集,也可以是无限的集合,叫无限集。如果一个图当中的点集和边集都是无限集,那么这个图就叫做无限图;如果点集和边集都是有限集,那么这个图就叫做有限图(不要问我为什么不存在点集无限,边集无限或者反过来的情况,这种情况是毫无意义的,因为你很难弄出跳转关系)
我们通常说的图一般是有限图。
入度和出度
度(degree) 在有向图和无向图当中意义不太一样,在有向图当中分两种,一种叫入度(in-degree),一种叫出度(out-degree),简单的讲,入度就是指向这个节点的边的数目,或者说,是到这个节点终止的边的数目;出度就是从这个点出发的边的数目。在无向图当中,度指的就是和这个节点相连的边的数目。
入边和出边
和前面入度与出度类似的,对于一个节点来说,入边就是指向它的边;出边就是从它出发的边。
带权值图和权值边
有的图当中这个边是带有权值的,比如从滨和路到龙翔桥坐地铁要 4 块钱,那么滨和路到龙翔桥的这条边就要一个 4 的权值,这个时候我们应该怎么办呢?很简单,只要拓展一下边的定义即可。原来我们对于边的定义是一个二元组
一般地,我们的图表示的时候可以带上权值,也可以不带权值,这两种情况代码小有差异,但总体思路不变。
孤点,重边,自环
这三个概念比较显然,我一起讲了。
无向图中,孤点指的是一个没有任何边与它连接的点;重边指的是两点之间存在多条边(这些边的权值可以不同);自环指的是自己与自己之间有一条边。
有向图中大体类似,孤点指的是没有任何入边或者出边的点;重边指的是节点
图的存储
图的存储用很多种方法,按照 OI Wiki 上的说法,有存边,邻接矩阵,邻接表,链式前向星四种做法。从个人观点以及参考书上的说法看
下面的示例代码,我将实现这几个功能(函数):添加一条边,查询两个点之间是否有边(并输出权值),以及深搜整张图输出经过节点编号(每个节点只经过一次)。
邻接矩阵
为了表示图,我们引入了一个东西,叫做矩阵。什么叫做矩阵?矩形的数字阵叫做矩阵。如下所示,一个矩阵分成若干行和若干列。
那么怎么用它来表示图呢?假设第
这个矩阵一定是
在无向图中,正如前文所说,我们会将其建成有向图,其中每个边都有两个方向,你可以自己拿一下纸笔画一下一个无向图对应的矩阵,显然是对称的。
接下来我们看一个示例加深一下理解:
对于如下的矩阵:
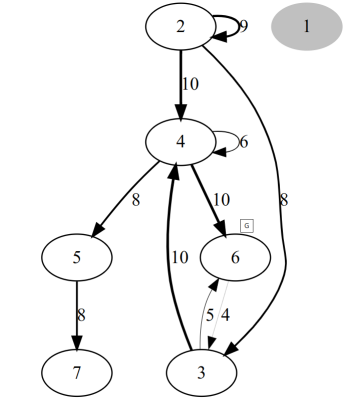
这说明了:
从 1 出发没有任何节点
从 2 出发指向了 2,3,4;边权分别是 9,8,10。
从 3 出发指向了 4,6;边权分别是 10,5。
从 4 出发指向了 4,5,6;边权分别是 6,8,10
从 5 出发指向了 7;边权是 8
从 6 出发指向了 3;边权是 4
从 7 出发没有任何节点
画出来的图是这样的:
代码:
constexpr int MAX_N = 100;
int G[MAX_N][MAX_N];
int n, m; //节点数,边数
void addEdge(int u, int v, int c)
{
G[u][v] = c;
//如果是无向图的话要加一句G[v][u] = c;
}
int hasEdge(int u, int v)
{
return G[u][v];
}
bool vis[MAX_N];
void dfs(int u)
{
if (vis[u]) {
return;
}
vis[u] = true;
cout << u << ' ';
for (int i = 1; i <= n; i++) {
if (G[u][i] != 0) {
dfs(i);
}
}
}常见操作复杂度
| 操作 | 复杂度 |
|---|---|
| 需要空间 | |
| 添加一条边 | |
| 查询两点是否相连 |
优势
实现简单,速度快
劣势
占用空间大,无法处理重边,遍历的时候会做大量的无效操作(就是在没有边的地方要一直空判)
vector 优化的邻接矩阵(也可以认为是邻接表)
在邻接矩阵当中,我们发现了很多问题,其中最大的问题就是无法处理重边以及大量空间的浪费。
让我们想一想,在邻接矩阵当中什么导致了空间浪费?是大量的“0”。假如我们把边看成萝卜,那么邻接矩阵的做法就是先挖足够的坑,然后将所有的边一个萝卜一个坑填进去。这会导致两个问题:1、有很多空的坑。2、我没法一个坑放好几个萝卜,而我也不能够新挖坑(处理重边的时候遇到的就是这个问题)。
如何优化,这就涉及到 STL 里面一个东西叫做 vector 了,vector 相比传统的数组,它支持一个操作,那就是向后插入元素。这对解决我们的问题就很有用了,相当于我能够做到来一个萝卜挖一个坑,既不会有多出来的坑,遇到重边的时候我可以给它再挖一个坑,而不用和原来的坑之间“打架”。
我们为了实现这个目的,我们会声明一个 vector 指针数组,第一维代表了索引,就是从这个编号代表的点出发的边的一个 vector,然后 vector 里面储存终点编号和边权。从而达到这个效果。
代码:
typedef pair<int, int> P;
constexpr int MAX_N = 100;
vector<P> G[MAX_N];
int n, m; //节点数,边数
void addEdge(int u, int v, int c)
{
G[u].emplace_back(v, c);
//如果是无向图的话要加一句G[v].emplace_back(v,c);
}
int hasEdge(int u, int v)
{
for (auto it : G[u]) {
if (it.first == v) {
return it.second;
}
}
return 0;
}
bool vis[MAX_N];
void dfs(int u)
{
if (vis[u]) {
return;
}
vis[u] = true;
cout << u << ' ';
for (auto it : G[u]) {
dfs(it.first);
}
}常见操作复杂度(degree(V)代表的是一个点的度,按照大 O 标记法的定义,可以看成 O(V))
| 操作 | 复杂度 |
|---|---|
| 需要空间 | |
| 添加一条边 | |
| 查询两点是否相连 |
优势
占用空间相对较小(当然,链式前向星更小一点),可以处理重边,遍历快速简单,在新兴的 OIer 当中最常用。
劣势
查询两点速度慢,实现和理解稍微复杂,在网络流中标记反边会遇到一些困难。
链式前向星
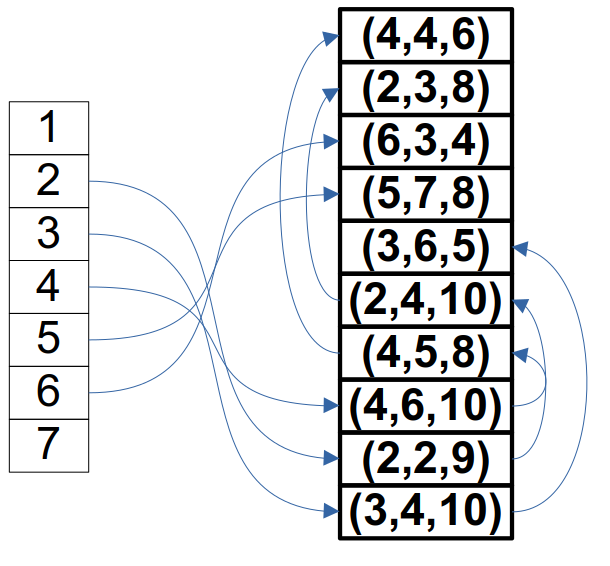
链式前向星和 vector 的方法大同小异,但是链式前向星是直接存储边的。这里假定你已经学过了链表(没学过的自行百度)。链式前向星这个名字和它的存储方式就紧密相关:链式,说明它存储的方式是使用类似链表的方式;前向,代表了你添加边是在链表头上添加的。(这和普通链表不一样,普通链表加在尾巴上,它加在头上,这是为了插入的速度尽可能快)
链式前向星由这两个部分组成:一个是 head 数组;另一个是 edges 数组,其中,head[u]代表了以 u 作为起点最后一条边的编号;edges[u]由四个部分组成,分别是终点v,边权c,前一条边的编号nxt。
我们来模拟一下链式前向星的插入过程:
1、读入起点u,终点v,边权c,声明一条新的边edges[k]并附好值
2、edges[k]的nxt置为head[u],head[u]置为k(就是现在的开头指向原来的开头,然后开头更新为现在的开头)
以前面邻接矩阵的那个图为例,我们画出来就是这样:
代码:
constexpr int MAX_N = 100; //最多点数
constexpr int MAX_M = 1000; //最多边数
int head[MAX_N];
struct Edge {
int v, c, nxt; //默认下一个是-1(因为下标不可能是-1,而且用-1在遍历的时候有好处)
} edges[MAX_M];
int cnt; //用来标记下一个声明到哪里了
int n, m; //节点数,边数
void init()
{
for (auto& edge : edges) { //因为我要修改原值,所以这个地方要用引用
edge.nxt = -1;
}
for (int& i : head) {
i = -1;
}
cnt = 0;
}
void addEdge(int u, int v, int c)
{
edges[cnt] = { v, c, head[u] };
head[u] = cnt;
cnt++;
}
int hasEdge(int u, int v)
{
//如果遍历到末尾,那么它的下一个是-1,-1对应的是0xff,按位取反后就是0,也就是false
for (int i = head[u]; ~i; i = edges[i].nxt) {
if (edges[i].v == v) {
return edges[i].c;
}
}
return 0;
}
bool vis[MAX_N];
void dfs(int u)
{
if (vis[u]) {
return;
}
vis[u] = true;
cout << u << ' ';
for (int i = head[u]; ~i; i = edges[i].nxt) {
dfs(edges[i].v);
}
}常见操作复杂度(之所以说 vector 法是邻接表,因为它复杂度什么的和这个一样)
| 操作 | 复杂度 |
|---|---|
| 需要空间 | |
| 添加一条边 | |
| 查询两点是否相连 |
优势
占用空间极小,可以处理重边,遍历较为简单,在网络流中处理反边比较容易,在老一辈 OIer 以及网络流当中常用。
劣势
查询两点速度慢,实现和理解比较复杂。
References
[1]:数学奥林匹克小丛书(高中卷)17:图论 P1
[2]:这几节基本来自OI Wiki,在部分难懂的地方我加了解释
[3]:这里指的都是最大复杂度,复杂度的表示请详见算法复杂度分析一文
[4]:《算法(第四版)》,英文原著为"Algorithms(Fourth Edition)",Robert Sedgewick, Kevin Wayne 著,谢路云译,人民邮电出版社出版